ScanTech HSR High Speed Ultrasonic Scanner
The MFE – HSR Crawler (High-Speed Raster) is an innovative ultrasonic scanner that addresses the need for an automated raster type unit offering higher performance and durability over an extended range of applications.
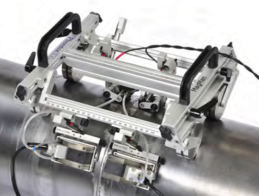
Description
The MFE – HSR Crawler (High-Speed Raster) is an innovative ultrasonic scanner that addresses the need for an automated raster type unit offering higher performance and durability over an extended range of applications.
The scanner traverses large vessels with obstacles that are problematic for most tank crawlers, yet performs corrosion scanning on pipe down to 2″ nominal diameter while requiring no probe adjustments over the range.
The scanner offers high maneuverability via steering with the controller’s touch-screen interface or optional extended joystick. A spring-detent suspension allows all four of the large diameter magnetic wheels to maintain contact on uneven surfaces. Locking the suspension provides optimal alignment on the pipe. A parking function lifts the advanced transducer/coupling shoe assembly for crossing over larger obstacles. High scanning speed is achieved without sacrificing high torque and actuator force, and the specially engineered gears are coupled directly to all four wheels through a compact, sealed enclosure for durability and low maintenance. The high quality servo motors are powered with specially designed low EMI motor drives in a closed-loop configuration, offering high positional accuracy. Scanning operation may be controlled using simple step and directional signals. A home positioning routine is utilized with solid state end sensors for collision control. Conventional or phased array type transducers can be deployed, and the scanner is offered in extended stroke lengths.
Features:
- Widest application range available.
- Extended capabilities include Storage Tanks and Piping as small as 2 inches nominal diameter.
- High Speed and High Torque.
- Engineered for rugged environments.
- Robust environment sealing.
- Custom engineered gearing with direct coupled four wheel drive.
- Extended stoke lengths.
- High strength rare earth magnetic wheels.
- Optimized traction compounds.
- Highly maneuverable.
- Joystick or touch screen steering controls.
- Homing and limit sensors.
- No probe adjustments required for changing pipe diameter.
- Suspension configuration allows 4 wheel contact on uneven surfaces (Spring Centered).
- Low EMI noise motor drives.
- Internal or external scan control.
- Remote probe lifting mechanism.
- Circumferential scan, axial index mode for phased array application on piping.
- Touch screen controller.
General Specifications:
- Drive Axis – Speed: 11″/ second. (28 cm/second)
- Drive Axis – Torque (per drive second): 74″/lbs. (8.36 Nm) (x2 for dual drive).
- Drive Axis – Encoder resolution (full cycles): 3081.767 cycles/inch (121.33 cycles/mm) (1 cycle typical. = 4 pulses.
- Scan Axis – Speed: 25″/second: (63.5 cm/second)
- Scan Axis – Actuator force: 20 lbf (89N).
- Scan /Axis – Encoder resolution (full cycles): 1381.648 cycles/inch (54.4 cycles/mm).
- Scan Arm Lengths: 12″, 24″ (36″ proposed) (30.5, 61 cm).
- Over-Travel: Approximately 1″ per side (25 mm per side).
- Scan Limit Protection: Magnetic limit switches.
- Magnetic Pull Force: 45 lbf per wheel (202 N) (x4).